Because of the increasing advances in technology, smart systems are increasingly being used. These systems allow technicians, administrators, and managers to monitor and control the performance of devices from a safe distance. A monitoring system is very important when working in the field of three phase systems Moreso in this rainy season and the need to know what is happening around your power source is seminal. These programs can be installed on the user’s smartphone or company computers to allow employers to make decisions if there is an error.
The main objective of my paper this rainy month of April is to create a smart monitoring system based on an intelligent control system. My proposed system is called a smart voltage and current monitoring system or SVCMS. The SVCMS is designed to monitor the performance of a three-phase grid by measuring voltage and current. The SVCMS design consists of two parts; the first is the control system. This system has been designed using the Arduino Nano V3.0 as a microcontroller to read and calculate the RMS voltage and current from sensor units. The Arduino Nano V3.0 is an open-source platform that is very cheap, flexible, and has special-purpose data processing capabilities. Walk in at Nerokas, Thika and you will be sorted. Got mine at 4500/= only. The last part in the control system is the Bluetooth HC-05. This Bluetooth HC-05, is one of several types of wireless communication [20] (ZigBee, Wi-Fi, etc.) unit placed between the control system and the end user (monitoring system).
The aim of this work was to design and implement a low cost and safe three phase measuring system and to design a smartphone application to monitor the data received from the three phase measuring system during these flooding season. My SVCMS has been designed to measure three phase voltages and currents for all three phase systems that have a line to ground voltage of less than 250 VAC with a current value of less than 30 A.
There are more methods for controlling and monitoring a three phase circuit depending on the controller or the type of display for the results of the voltage and current. In my paper, a new method for monitoring and displaying the three phase system is given; this method is called the smart voltage and current monitoring system, or SVCMS, where a smartphone is used instead of traditional methods like an LCD display or an analog method for monitoring and displaying the results. It consists of two major parts which are the control and monitoring parts. The control part has four branches which are: a voltage sensor unit, a current sensor unit, the Arduino Nano V3.0 unit, and wireless communication unit (Bluetooth device), while the second part contains the monitoring part that monitors the voltage and current for three phases using the Android smartphone application which is written using the JKUAT App Inventor 2, an open source software platform available from Google for Android project applications.
Now, the control part I will break it down for the reader(s). It mainly consists of two sensors for measuring the voltage and current. The voltage sensor contains the transformer and two op-amps (LM358). and the voltage sensor circuit in the pic below, the Matlab Simulink simulation of the three phase voltage system is shown below as well. The input voltage sine wave is offset equal to zero and upper with lower voltage of 230 V. The output voltage should range between 0 and 5 V for the microcontroller which is offset around 2.5 V. This circuit is used to reduce the voltage in order to deal with the high voltage.
Matlab/Simulink of a three phase voltage system
Simulation result (both input and output voltages)
My smart voltage and current monitoring system (SVCMS), is designed and implemented to measure and monitor three phase voltages and currents. The SVCMS model is more cost effective than similar models that use heavy current transformers (CTs). It is also safer than having to measure the mains voltages very often. It is a low cost and easily applicable model for measuring and monitoring three phase system performance as compared with other models. Any technician can also work with the domain like virtual reality. The monitoring system uses a new Android smartphone application designed by MIT App Inventor 2. This application receives the three phase RMS voltage and current data from the Bluetooth device (HC-05). The SVCMS has been tested successfully internally at our trial R&D labs in KE, SML, MZQ and US.
The future of smart monitoring system model and applications is to replace the Bluetooth wireless communication system by Internet of Things (IOT) technology. This technology will be used to connect the sensors and devices over the internet by allowing them to talk to us, work in applications, and interact with each other. I hope KPLC & SOMPOWER, team members are taking notes of this nifty idea(which I haven’t patent) as is work meant to improve the lives of every citizen in East and Horn of Africa.
Al intelligence (AI) is a fast-growing innovative technology that will have a huge impact on projects and project management practices in the forthcoming years. The purpose of this paper is to contribute to project management theory and practice in the construction industry by analyzing the expectations of project professionals. A mixed method based on an international survey and semi-structured interviews was applied. The results show that construction project practitioners are looking for AI solutions to support the quantitative processes mainly related to scope, schedule, cost, quality, and risk management. However, the human-related processes, such as communication and stakeholder management, are not expected to be directly enhanced by AI, although might benefit from it indirectly. The findings also demonstrate a difference between amplifying and accelerating countries, where somewhat surprisingly the latter are more ready to adopt AI in their projects.
The continuously rapid advancement in technology Moreso in East and Horn of Africa is changing almost every aspect of organizational and managerial activities. The fast-growing discipline of Artificial Intelligence (AI) gets more and more attention from practitioners and academics in different fields of management, and is expected to disrupt the field of project management (PM).
Projects in the construction industry had taken a predominant role from the inception of the PM field. Even though new sectors and non-traditional industries also apply PM practices, the construction industry in East and Horn of Africa still constitutes a major part of the evolving PM body of knowledge. As a well-established domain of professional PM, the construction industry can, therefore, be an interesting case to investigate how new technologies, such as AI, have the potential to improve and reshape the profession.
AI was initially introduced in the 1950’s aiming to replicate human intelligence using computer programs. Although throughout the years the field of AI experienced major fluctuations, mainly due to a mismatch between the level of expectations and the level of available applications, it seems that current AI technologies are mature enough to provide substantial improvements in different aspects in the workplace, including project operational and managerial processes.
The aim of this paper is to analyze construction project practitioners’ expectations with regard to AI being applied to PM processes and practices. The paper starts with an introduction to AI. The next section reviews AI applications in the context of construction PM, by knowledge areas. Then, the research question and methodology are described, followed by reporting the research findings. The paper is finalized with a discussion of the main insights and concluding remarks on the limitations of the current study and directions for further research.
The current paper adopts the recent approaches, therefore suggesting that AI is based on the increasing capabilities of technology to analyze data, learn, perform tasks that are currently performed by humans, and adaptively interpret external conditions. In the context of project management, it means that AI technologies can be used to autonomously perform routine tasks and to support the project manager’s work by recommending preferred decisions and actions based on the machine’s competence to be adaptive to different environments and situations.
AI technologies are classified based on levels of specialization and intelligence. Narrow AI (NAI) refers to applications that are focused on a single subset of cognitive abilities to learn and do well only what they were designed for, within a specific spectrum, therefore usually used to automate specific tasks and improve efficiency. Examples in the context of project management might include optimal resource allocation, optimal project schedule, or optimal contract prices for the procurement of goods. General AI (GAI) includes intelligent applications that can autonomously learn and perform as, or even better than, humans on a wide range of tasks. GAI for project management might be in the form of project portfolio selection, analyzing customer requirements, or optimizing operation and site safety. The highest level of AI, named Super AI or superintelligence, refers to systems that exceed human intelligence and abilities, defined by Boström as “intellects that greatly outperform the best current human minds across many very general cognitive domains”. However, there is no consensus on if and when it will be possible to develop superintelligence systems, and there is a wide agreement that the current state of the art in AI cannot support superintelligence.
Robotics Inspired Renewable Energy Developments: Prospective Opportunities and Challenges
The domain of Robotics is a good partner of renewable energy and is becoming critical to the sustainability and survival of the energy industry Moreso in East Africa & Horn of Africa as well. The multi-disciplinary nature of robots offers precision, repeatability, reliability, productivity and intelligence, thus rendering their services in diversified tasks ranging from manufacturing, assembling, and installation to inspection and maintenance of renewable resources. My paper explores applications of real robots in one feasible renewable energy domain; solar.
In each case, existing state-of-the-art innovative robotic systems are investigated that have the potential to create a difference in the corresponding renewable sector in terms of reduced set-up time, lesser cost, improved quality, enhanced productivity and exceptional competitiveness in the global market. Instrumental opportunities and challenges of robot deployment in the renewable sector are also discussed with a brief case study of Saudi Arabia. It is expected that the wider dissemination of the instrumental role of robotics in renewable energy will contribute to further developments and stimulate more collaborations and partnerships between professionals of robotics and energy communities.
INDEXTERMSApplied robotics, automation in renewable energy, mobile robots, robotic manipulators, solar PV module, wind turbines.
I.INTRODUCTION
Human civilization perpetually depends on the energy that has become a fundamental entity behind social, scientific and economic developments. Thanks to advancements in various technological avenues, reliance and dependence on fossil fuel are getting reduced due to limited availability, growing needs and environmental concerns. Therefore, since the last two decades, research and innovation in the renewable energy sector have attracted the utmost attention of the scientific and engineering communities. Primarily driven with economic growth and climate mitigation, it is anticipated that 100% of renewable energy may be available by 2050. This huge target can be achieved if and only if novel and innova- tive development, adaptation, commercialization and deploy- ment technologies are presented by the scientific community to strengthen further the applied research associated with the renewable energy sector. Consequently, there is an immense need to critically analyze the performance and via- bility of the existing processes to automate these using recent cutting edge technologies.
Robotics is an applied domain whose radius of applications is getting incredibly wider owing to its multi-disciplinary nature. Robotics engineering is now being acknowl- edged as a dedicated branch of engineering. Robots are extensively used in agriculture, food, medical, cognition, nuclear , space , aerospace, under-water, industrial, oil and gas, textile and in other tracking,applications. International Federation of Robotics (IFR) is considered as a primary resource of providing data on the worldwide use of robots. IFR classifies the robots into two broader categories; industrial robots and service robots. In autumn 2019, IFR released the latest statistics of robot and Section IV respectively classify robots for solar and wind sectors and present recent and prominent state-of-the- art developments. Section V deals with the contributions of robots in other domains of renewable energy, namely hydro energy and bio-energy. Section VI briefly outlines the chal- lenges and explores further opportunities for robotics in the renewable energy sector. A brief case study of Kingdom of Saudi Arabia (KSA) is presented in Section VII. Finally, Section VIII comments on the conclusion and highlights the potential benefits of this comprehensive review stating a 6% increase in global robot installations in 2018 with a record sales value of 16.5 billion USD. It is reported that a greater trend toward automation is the primary reason for the tremendous increase in the demand for industrial robots particularly since 2010. The speculated average yearly growth rate of industrial robots during 2019-2021 is 14%, with new installations of around 2.1 million setups round the globe. The estimated annual supply of industrial robots with a forecast in the coming years are presented in Fig. 1. Automo- tive, electrical/electronics and metal/machinery sectors are the top three industries w.r.t. deployment of industrial robots. Statistics for robot usage in the renewable energy sector is not available as of to date.
This paper is related to applications of robotics in the renewable energy domain. The relationship between robotics and renewable energy can be described in two folds; renew- able energy resources can be used to meet the power require- ments of the robots while on the other side, robots find enormous potential in renewable energy technologies. The former aspect is reviewed in detail by the author in. It is highlighted that the power system of a robot can be based on solar, wind and biological energy. In contrast, the present review deals with the later aspect. Robots have the potential to completely transform the traditional methods in the renewable energy sector. They can precisely perform common industrial tasks like machine tending, grasping, cutting, drilling, pol- ishing, painting, welding, assembling, palletizing, packing, moving, cleaning, sorting in addition to automating assembly lines and pick and place operations. Most of these operations are essentially required in the renewable energy industry, e.g. during manufacturing, assembling, installation, inspection and maintenance of panels and wind turbines. In combination with computer vision , image processing and control, robots offer intelligent and automated solutions to improve quality and enhance productivity with adaptability and efficiency at reduced costs and thus demonstrate a central role in making renewable energy resources more competitive.
KEYCONCEPTSBEHINDROBOTICMANIPULATORS Robots can be generally classified into manipulator-type robots and mobile robots. The former category is more common in the renewable energy sector. Understanding of the fundamental concepts behind robotic manipulators is important to adapt a general-purpose robot for a specific application. These concepts include but are not limited to; kinematics, dynamics, control, trajectory planning, cost, workers’ safety, ease in Operation and Maintenance (O&M), etc. Some of these concepts are detailed below:
FIGURE2. Robot categories (a) Serial stage (b) Parallel Kinematic
Manipulator (PKM).
A. KINEMATICS AND DYNAMICS
A robotic manipulator can be kinematically based on serial or parallel mechanisms. The serial robots offer a significant percentage of robotics-based solutions in the renewable energy sector (See Fig. 2a). However, the robots with Parallel Kinematic Manipulator (PKM) structure (Fig. 2b) have been recently introduced in the energy sector.
An example of a platform centered on a 6-DOF (Degree Of Freedom) serial link articulated robotic manipulator is shown in Fig. 3. The framework named as AUTonomous Articulated Robotic Educational Platform (AUTAREP) has been devel- oped for educational and research purposes. The actuation system consists of six precise DC geared servo motors while the sensing system comprises of position encoders, a force- sensing resistor and an on-board camera. Applications of the platform implementing frequently encountered industrial tasks, e.g. pick and place and sorting are reported in while software and hardware architectures of the platform are presented in.
On the other hand, PKM is an ideal choice for light-weight applications with the robotic end-effector offering low inertia and high stiffness and high payload capacity. However, the workspace envelope of a PKM is relatively smaller when compared to serial manipulators. A popular example of PKM is FlexPicker, also called as ‘Delta’ robot. The robot accounts for 3-DOF configuration restricted to move only in translation.
One of the preliminary steps to realize a robotic system in an applied context is the modeling of its kinematics and dynamics behavior. Modeling can be based on Denavit- Hatengerg (D-H) parameters or other representations, including Hayati-Roberts (H-R), screw theory, geometrical, Lie Algebra, etc. A detailed review of the modelling of robotic manipulators is reported in. The forward kinematics of the AUTAREP manipulator is derived in, while the inverse kinematic model is reported in. Unlike serial manipulators, the direct solution in PKM cannot be derived analytically. For a PKM, a vector loop equation is formulated for each limb considering a closed-loop kinematic chain.
The extension of a robot’s kinematics is the development of dynamic models mainly used for acceleration analysis. The dynamics equations can be formulated based on several methods like Newton-Euler, Euler-Lagrange, recur- sive Lagrange, D’Alembert principle and Kane’s equations. The first two approaches are more commonly followed. The dynamic model of the AUTAREP manipulator based on the Euler-Lagrange method is reported in. For PKM, explicit equations representing system dynamics are complicated due to the closed kinematic chain in the manipulator. One way to build a computationally inexpensive model is to use the principle of virtual work.
B. CONTROL
Analysis and investigation of robotic manipulators in an applied context has highlighted the immense need for com- plex strategies for control and dexterity. Systematic reviews on current and emergent control strategies for robotic manipulators are reported in. Since the last three decades, industrial processes have been classically controlled based on linear control laws. Proportional Integral Derivative (PID) implementation of AUTAREP is reported in while Linear Quadratic Regulator is presented in [86]. The research community has lately applied advanced control
strategies based on modern and nonlinear control laws on multi-DOF robotic manipulators to deal with uncertain parameters and disturbances . The control laws based on Sliding Mode Control (SMC), Passivity Based Control (PBC), Model Predictive Control (MPC) and have been implemented on AUTAREP manipulator. A typical response is illustrated in Fig. 4, which shows the ability of a non-linear control technique to handle disturbances.
ROBOTSINSOLARENERGYSECTOR
Robots find enormous potential in production, handling, installation, inspection and maintenance operations in the solar sector. In a typical solar system manufacturing, robots can automate various processes involving silicon mod- ules, silicon ingot, solar cells and silicon wafers. The role of robots in the solar energy sector can be broadly categorized into two domains; (a) Handling cells and wafers and (b) installing, assembling and performing O&M of solar panels.
A. ROBOTS FOR HANDLING CELLS AND WAFERS
Robots are best suited to handle silicon wafers and solar cells owing to their ability to handle delicate components. Compared to the performance achieved with manual proce- dures, robots assemble various solar components in a precise and gentle fashion since they can accurately demonstrate user-defined speeds while ensuring reliability and repeatabil- ity. A prominent example of efficiency improvement in solar cells using the application of advanced technologies is ‘p-type monocrystalline percsolarcell’ by a company Jinkosolar, which proclaims itself as the largest manufacturer of Photo- voltaic (PV) arrays. Marking a new world record, the com- pany improved the efficiency of the cells from 22.78% to 23.45% with the help of technologies like mobile robots, intelligent mobile devices and the Internet of Things (IoT) in the manufacturing chain.
Various robots have been reported in the scientific commu- nity for cell and wafer handling. IRB Flex Picker, by ABB Inc., is an industrial robot used for sorting and handling of silicon wafers and solar cells. It is also applied for loading and unloading of solar cells production units and is considered as the fastest robot in terms of executing pick and place cycles per minute. It offers maximum han- dling of 15g at 200 cycles/min. The cycle time depends upon the tool, gripper, path radius, etc. It is an inverted mounted robot with 120-145Kg weight having a payload capacity up to 8Kg. Another functionally similar robotic manipulator used for pelletizing/depolarizing, handling and loading/unloading applications is IRB 4600. It can handle heavy payloads of up to 20Kg with flexible mounting capability. Another prominent name of the global mechatron- ics solution provider is Stäubli Corporation, which offered 4-axis and 6-axis robotic manipulators to handle all crys- talline (c-Si) production processes. Examples of the robotic arms include ultra-precise 4-axis FAST picker TP80, SCARA (Selective Compliance Assembly Robot Arm) TS and 6-axis TX manipulator.
Cutting of solar cell modules and edge trimming is another important step in the production of solar panels. IRB
6640 series of ABB industrial robots offer high precision to achieve this step in the shortest cycle time. This series of robots provide a reach from 2.55m to 3.2m with a handling capacity from 130Kg to 235Kg. Further, for the preparation of ribbons and soldering of solar cell modules, IRB 1600 series of ABB robotics is an efficient deal. While ensuring quality and reliability, the robot offers 1.2m to 1.45m reach and can handle 6Kg to 10Kg payloads with almost up to half-cycle time than other competitors [92], [93]. Adept Robotics offers a similar solution for solar panel production. Overhead mount robot, Quattro s650, is a parallel robot that offers the largest work envelop and handles solar cells at the highest speed with minimum breakage level [94]. It can handle a payload of up to 6Kg. Adept Inc. further facilitates solar panels’ cutting, sorting, assembly, testing, loading/unloading, and inspection with its Viper and Cobra modules.
In an attempt to strengthen the manufacturing of solar cell arrays with a focus on the space industry, researchers from the Robotic Institute of Shanghai Jiao Tong University have developed a robotic platform to automate various pro- cesses. The platform can auto-dispense and can auto-laydown with a three DOF mechanism (see Fig. 6) to handle the large sizes of arrays with high precision. The system effectively takes care of adhesive thickness, avoids bubbles formation and offers stainless production.
FIGURE6. CAD model of a robotic system for auto-dispensing and auto-laydown of solar cells for space industry.
PV cells are covered with a protective glass coating, whose capability to generate electricity is constrained if dust accumulates on the modules. A study reported in explored the relationship of dust thickness and solar intensity on the power output of a PV module. The experimental setup consists of a fixed tilt angle of 16◦ . The results in the form of power output corresponding to solar intensities of 400 W/m2 – 700 W/m2 for various dust thickness were presented. It was noticed that degradation in the PV performance decreased with the increase in solar intensity. The reduction in power output was negligible at 700 W/m2 compared with a 25% reduction at 400 W/m2 . Another study investigates the effect of varying tilt angles on the transmittance of plates due to atmospheric dust for around one month. Figure 7 presents the results of this experimental study show- ing eight different degradation curves corresponding to tilt angles from 0-90◦ w.r.t horizontal. The results dictate that fractional degradation in transmittance is a strong function of dust accumulation and tilt angle in addition to the exposure period and climate conditions of the site.
Other recent studies exploring the degradation rate of transmittance as a result of deposition of dust and various contaminations are reported in.
Rain helps in cleaning the panel, provided they are slanted downward. However, in desert regions, sand and dust are accumulated on the surfaces. Cleaning by human labor- ers is not a viable solution due to the remote location of panel facilities and harsh weather. Table 1 presents a com- parative summary of cleaning strategies based on water- wash and robotic mechanisms. Autonomous robots with onboard state-of-the-art sensor technology have the potential to replace the traditional method of manual cleaning of the modules. The choice of a particular solution depends on the application domain, geographical terrain, desired perfor- mance and economic factors. A comprehensive study reported in mentions that automatic cleaning is an optimal choice for panel cleaning on Earth as well as on Mars.
Figure 8 illustrates a robotic cleaner conceptualized and realized under the supervision of the author. It is a custom- designed and indigenously developed wheel-based mobile robot equipped with a roller brush, ducted fan and blower fan.
The cost of the cleaner is as low as 50$. Figure 9 demonstrates the potential of the robot in cleaning PV modules.
Recently, mobile robots are being equipped with a multi- DOF robotic arm for cleaning of PV panels. A prominent example is of ‘Solar Panel Cleaning Robotic Arm’ (SPCRA), which is a 4-DOF mobile manipulator with two prismatic and two revolute joints. A single unit containing a wiper, an air blower and a water sprinkler is housed on the end effector. Experimental trials conducted on 50W solar panels demonstrated efficiency enhancement of 9.1%, which can be further improved to a significant extent using modules of a higher rating. Table 2 presents the results of the energy consumption of SPCRA for a one-time cleaning operation.
Other examples of robots cleaning solar panels include GEKKO, E4, RAYBOT, etc. GEKKO is a mobile robot that is claimed to be four times more efficient compared to manual cleaning. The robot can steep rooftops of up to 45◦ and is teleoperated by a joystick. Unlike GEKKO, another robot E4 performs cleaning operation without water using controlled airflow and microfiber to flick away soil. The gravity ensures that soil is wiped in the downward direction and off-panel rows. The robot has a dedicated onboard solar module to meet the power requirements. Thanks to the World Wide Web, the robot can be controlled anywhere from the globe and weather data is available from onboard sensors. Another autonomous robot based on dry-cleaning has been designed by Miraikikai Inc. Japan. It is a small wheeled robot that is powered with batteries and is equipped with advanced sensory mechanism and rotating brushes to remove sand and dust. RAYBOT is also a dry-cleaning robot presented by Ecovacs- a household robotic innovator. It is essentially a Roomba robot equipped with brushes, vacuums and a blower to wipe off sand. The robot has been successfully tested in China and California before its launch.
TABLE2. Energy consumption of SPCRA for one-time cleaning.
TABLE3. Popular solar panel cleaning robots.
ROBOTS FOR INSTALLATION, ASSEMBLING AND MAINTENANCE OF SOLAR PANELS
Robots are now becoming an integral part of the solar panels industry. Due to the complex design of the panels and associ- ated stringent requirements in terms of precision, consistency and delicate nature, robots are a natural choice.
Robotics community has offered numerous solutions to facilitate installation, assembly and O&M of solar pan- els. German companies Kiener Maschinenbau GmbH and PV-Kraftwerker jointly realized a solar plant installation robotic system named MOMO, which provides efficient pro- ductivity and offers reduced risk factors. The system, shown in Fig. 10, offers cost-effective assembly, mainte- nance, cleaning and dismantling of solar plants. It can be operated in difficult terrains and weathers for extended oper- ational periods. It is equipped with a gripper for automatic assembly of PV modules with the capability of numerous cycle repetitions. The robotic system can stand-alone cover 70Km of distance during an assembly operation.
KUKA Systems has offered state-of-the-art production lines for solar panel manufacturers . The pioneer assembly line installed in 2011 in Canada facilitated trimming, framing, testing and packaging of PV panels employing three automated lines with five robots for each line. Such assembly lines take care of all production stages of solar panels of different types and dimensions
. Besides, KUKA offers a whole range of robotized solutions for a variety of solar module manufacturing, cell and wafer handling, lamination, crystalline module simulation, etc.
National Renewable Energy Laboratory of the US, in coop- eration with Spire Corporation, has completed a project for automated production line for solar modules during
2003-2007 named NREL’s Photovoltaic Manufacturing R&D (PVMRD). The project comprising of three phases included the realization of large-area PV arrays (5ft by 12 ft), development of automated production tools for large scale manufacturing and design of solar modules simulator. Robots with various configurations were designed, tested and employed for the project. An operational scenario is sketched in Fig. 12, where a pair of SCARA robots is used to install bus ribbons and diodes. The complete module is processed in three parts using a conveyor belt mechanism so that moderate- sized robots can be used.
Robots are serving the installation and construction of solar PV plants making the process safe, fast and more economical.
FIGURE14. Comparison of power generated by a static panel and a moving panel.
Solar tracking systems find enormous potential in solar energy applications, as highlighted in. Tracking of the panels is important since the amount of energy har- nessed by a panel heavily depends on its orientation w.r.t. the sun. Also, the tracker helps in uniform distri- bution of solar flux over the surface of the collector. Figure 14 presents a typical comparison of power generation profiles in the case of static and moving panels. A significant difference in power generation capability in both cases is evident particularly in off-peak timings of sun.
Robots can offer a cost-effective and efficient solution for solar tracking along two dimensions. A study reported in presents an optimized design of a solar tracking system based on a 2-DOF robot with a parallel mechanism. The constrained optimization procedure avoids singularities and collisions between links/joints to permit large operational workspace. Based on the universal and spherical joints, the mechanism can move within the angle range 0◦ to 90◦ in elevation and −90◦ to 90◦ in azimuth. Figure 15 presents the experimental results in the form of monthly energy assessment compared to fixed solar panels with tilt inclinations of 0◦ and 30◦ . An overall improvement of 17.2% in energy production is reported using the proposed robotic system compared to the solar panel placed at a fixed inclination of 30◦ . Another automated tracking system centered on a mobile robot (QBotix) is reported in. With an electricity consumption of as low as 30 cents/day, the robot is claimed to have an average ability to adjust five solar panels/min. This idea can be extended to multiple mobile robots, which can also function in a coordinated manner for solar tracking of various arrays. Other studies reporting solar tracking systems include.
Furthermore, inspection and maintenance activities of solar plants are also being rendered by robotized systems. MAINBOT is one such platform designed for large industrial plants. The objective was to develop ground robotic vehicles and climbing robots with diversified sensory and manipulation capabilities to navigate in plants following horizontal and vertical paths respectively. The prototype of the robot (shown in Fig. 16a) has been successfully demonstrated on a cylindrical-parabolic collector type solar plant (Fig. 16b) and central tower plant (Fig. 16c). Results of leakage detection and prevention are reported in. As an alternative to climbing robots, recently Unmanned Aerial Vehicles (UAVs) are being used for inspection of solar plants. One such advancement is reported in, where a UAV and a thermographic sensor are used for inspection of a Concentrated Solar Power (CSP). Field trials were performed at an altitude of 20, 40, 60, 80, 100 and 120 m above ground level with cruising speeds of 5, 7 and 10 m/s. Experimental results proved the feasibility of using UAV to perform real- time inspections for detecting anomalous absorber tunes. Table 4 presents the results in the form of the percentage improvement in UAV deployment compared to the manual inspection. Depending upon the altitude and cruising speed, the improvement range in inspection time using a UAV is reported from 85.6% to 98.0%.
• The data gathered across several countries visited will be used to further define the influence of harmonics and voltage unbalance on the operation and efficiency of induction motors.
My gathered data correspond to the experiments developed to assess the real-time energy efficiency estimation methods used for induction motors.
Fig. 1 shows the experimental test setup used for the balance sinusoidal voltage condition.
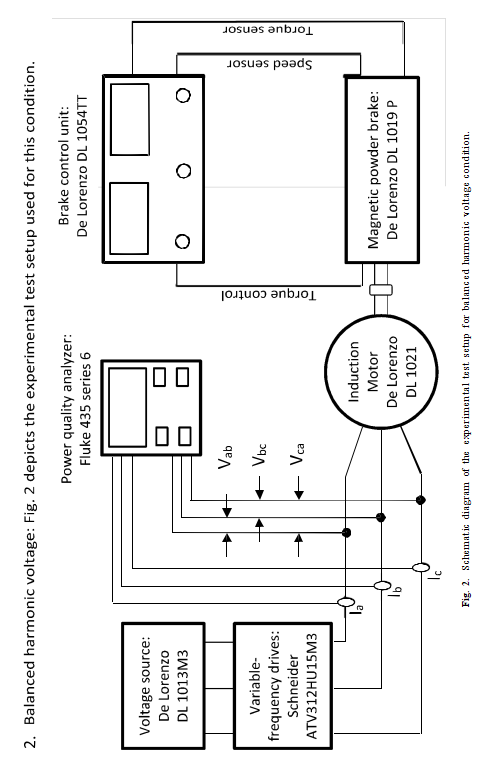
Fig. 2 shows the experimental test setup used for the balance harmonic voltage condition.
Fig. 3 shows the experimental test setup used for the unbalance sinusoidal voltage condition. Fig. 4 shows the experimental test setup used for the unbalance harmonic voltage condition. Fig. 5 shows the linear regression model of electric power vs. mechanical power of the Lorenzo induction motor (DL 1021), obtained from my gathered data.
ExperimentalDesign,Materials,and Methods
The electrical parameters measured during the experiments include:
• Line voltages: Vab , Vbc , Vca
• Voltage angles: θab , θbc , θca
• Line currents: Ia , Ib , Ic
• Current angles: ϕa , ϕb , ϕc
• Total harmonic distortion voltage (THDV) and individual voltage distortion (Vk ) (apply only
for conditions 2 and 4)
• Total harmonic distortion current (THDI) and individual current distortion (Ik ) (apply only for conditions 2 and 4)
• Power factor
A power quality and energy analyzer (Fluke 435 series 6) was used to measure these parameters.
The mechanical parameters included:
• Shaft torque
• Rotor speed
A brake control unit (De Lorenzo DL 1054TT) and a magnetic powder brake (De Lorenzo DL
1019P) were used to measure these parameters.
The electric and mechanic parameters were measured simultaneously.
The mechanical power was calculated with the mechanical torque and speed measured as
The efficiency was calculated with the power measured as [3]:
Pout
η=
where:
Pin
· 100 (%)(2)
η– Efficiency (%)
Pin – Electric power input (kW).
The load factor was calculated as [3]:
Pout
Lf =
r
where:
· 100 (%)(3)
Lf – Load factor (%)
Pr – Rated output power (kW)
For the experiments, an induction motor (De Lorenzo DL 1021) was used.
Four different power supply conditions were considered for my experiments:
1. Balanced sinusoidal voltage: Fig. 1 depicts the experimental test setup used for this condition.
The experimental setup in this case includes a voltage source (De Lorenzo DL 1013M3), which supplies the induction motor (De Lorenzo DL 1021). A magnetic powder brake is used to control the motor load by controlling the torque. The magnetic powder brake is controlled by a brake control unit (De Lorenzo DL 1054TT) that in addition measures the torque and speed. Moreover, the electric parameters are measured with a power quality analyzer (Fluke 435 series 6).
2. Balanced harmonic voltage: Fig. 2 depicts the experimental test setup used for this condition.
In this setup is included a variable-frequency drives, which is connected after the voltage source and operates at the nominal frequency during the experiments.
3. Unbalanced sinusoidal voltage. Fig. 3 depicts the experimental test setup used for this condition.
This setup is like Fig. 1. However, in this case a resistance is connected in series in one of the supply phases.
4. Unbalanced harmonic voltage: Fig. 4 depicts the experimental test setup used for this con- dition.
This setup includes a variable-frequency drive connected after the voltage source operating at the nominal frequency during the experiments. In addition, a resistance is connected in series to one of the supply phases.
The operation of the induction motor was measured at 11 load factors for each power supply condition.
The load factor was controlled by varying the torque with the magnetic powder brake (De
Lorenzo DL 1019 P) between 0.5 and 3.0 Nm at intervals of 0.25 Nm (i.e. 0.50 Nm, 0.75 Nm,
1.00 Nm, 1.25 Nm, 1.50 Nm, 1.75 Nm, 2.00 Nm, 2.25 Nm, 2.50 Nm, 2.75 Nm, and 3.00 Nm). The torque was controlled with the brake control unit (De Lorenzo DL 1054TT). Each experimental test was repeated 10 times.
The efficiency calculated from measured power was compared with the efficiency estimated by applying the nameplate, slip, current and air-gap torque methods.
The application of the nameplate method [4], requires the linear regression of the mechanical power as a function of the electrical power. Fig. 5 shows the linear regression between the mechanical power and the electrical power using the data depicted in Table 9.
The mechanical power output was calculated using the regression model:
Pout = 0.9895 · Pinput − 225.48 (4)
To implement the slip method, the mechanical power was calculated as [5]:
P – Number of poles ia – Instantaneous stator phase current of phase a (A) ib – Instantaneous stator phase current of phase b (A) vab – Instantaneous stator line voltage of line ab (V) vca – Instantaneous stator line voltage of line ca (V)
Pfe – Core losses
Pfw – Friction and windage loss
Psll – Stray load loss
Tag – Air-gap torque (Nm)
The combined no-load losses in the air gap torque method (i.e. Pfe + Pfw ) are estimated at
3.5% of rated power output, while Psll is estimated as 1.8% of rated output power [8].
The error between the efficiency calculated with the values of Pout measured experimentally,
and the efficiencies estimated with the Pout calculated with Eqs. 4, 5, 6, and 7 is determined as
[9]:
Error = 100 ·
where:
ηe − ηm
ηm
(9)
ɳe – Efficiency calculated with a value of Pout estimated with equation 4, 5, 6, or 8
ɳm – Efficiency calculated with the experimental value of Pout
Conflictof Interest
I(Samwel Kariuki) declare that i have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Modern power systems are experiencing fundamental changes that are driven by global warming policies, market forces, and the advancement of technology.
They are, at the same time, facing multiple challenges on different fronts,more so in our continent. Assigned East and horn of africa,i embarked on a research journey to assess stability on our power systems across several countries in EA and HoA. somalia and Kenya were my field study grounds.
Challenges and Future Research Opportunities
The novel paradigm of employing machine and deep learning in power system TSA has proven popular among researchers and has shown great promise on benchmark test cases. However, building the next generation of TSA tools, using data mining and artificial intelligence, is still a work in progress. Namely, stepping from benchmarks into the real- world power systems is often plagued with difficulties emanating from system complexity and unforeseen circumstances. Considering the importance of power systems, there is still ample need for research that corroborates the quality and robustness of this data-driven AI approach to solving the TSA problem. Hence, Appendix A provides another brief overview of selected research concerning different state-of-the-art AI approaches to power system TSA. This overview presents a snapshot of the current state of affairs, hints at open challenges, and at the same time, points toward future research opportunities.
In the domain of dataset building,several challenges facing the research community are identified: (1) open sourcing datasets from power system WAMS measurements,
(2) addressing potential security concerns associated with WAMS data,
(3) open sourc- ing existing benchmark test cases,
(4) providing a unified and consistent set of benchmark test cases featuring power systems of varying sizes and levels of RES penetration,
(5) providing benchmark test cases featuring hybrid AC/DC power grids,
(6) providing standardized simulated environments of power systems for the reinforcement learning.
These points deal with standardization of benchmark test cases and bringing them closer to the expected future levels of RES penetration, as well as introducing the hybrid AC/DC power grids. It also deals with bringing standard simulated environments for RL (i.e., something such as OpenAI Gym (https://gym.openai.com, accessed on 18 November 2021) for power systems). The hard work of building some of these components is already under way, with the support of the LF Energy (https://www.lfenergy.org, accessed on 18 November 2021) umbrella organization of open-source power system projects. In the domain of data processing pipelines, challenges include:
(1) automatic data labeling,
(2) cre- ative features engineering for real-time performance,
(3) dealing with the class imbalance problem,
(4) dealing with missing data,
(5) dealing with data drift,
(6) using embedding as a features space reduction, and (7) using autoencoders with unsupervised learning for dimensionality reduction.
In the domain of model building, several issues have been identified with some of the DL-based image classifiers when applied to the power system TSA. In addition, training of deep learning models, in general, is associated with its own challenges: proper layer initialization, learning rate scheduling, convergence, overfitting, vanishing gradients, forgetfulness, dead neurons, long training times, and others.
Reinforcement learning models, at the same time, are even far more difficult to train. Furthermore, RL models tend to be “brittle” and may exhibit unexpected behavior.
Tackling these different challenges, at the same time, presents new research opportunities. In the domain of synthetic data generation from benchmark test cases, future research may address the following issues for stress-testing the existing models:
(1) introducing different types of noise and measurement errors into datasets,
(2) introducing different level of class imbalances into datasets,
(3) introducing different levels of RES penetration into the IEEE New England 39-bus test case,
(4) using deep learning for features extrac- tion from time-domain signals,
(5) artificial features engineering,
(6) speeding up numerical simulations of benchmark test cases with parallel processing or by other means,
(7) introducing hybrid AC/DC power grid test cases for transient stability analysis.
In the domain of model building, future research opportunities arise from applying different deep learning models to the power system TSA problem. Employing stacked autoencoders, transfer learning, attention mechanisms, graph neural networks, and other state-of-the-art deep learning architectures is seen as a way forward. Particularly important would be applications of deep learning architectures designed specifically for processing long time series data, image classification, and analyzing graph structures. This is generally seen as a major area of deep learning research, where any novel architecture in this area may be tested on the TSA problem as well. It would also be interesting to see if three-phase signals can be exploited as RGB channels in convolutional layers, with cross-learning between channels/phases. There are research opportunities in devising novel and better ways of converting multivariate TSA signals into images for use with very advanced deep learning image classifiers.
Another major issue with deep learning is a general lack of model interpretability, cou- pled with the difficulty of understanding the model’s decision-making process. However, there is active research in this area as well.
All major deep learning frameworks allow fast model prototyping and training on powerful distributed hardware architectures in the cloud. This levels the playing field for researchers and lowers the barrier for entry. When it comes to model maintenance, TSA is associated with a data drift phenomenon emanating from steadily increasing RES penetration. Efficiently dealing with data drift is a point of concern for model serving, along with issues of model latency and throughput. Namely, model prediction serving performance (i.e., latency) needs to be in real time for maintaining transient stability of power systems following a disturbance. This limits the computational time available for pipeline processing and may impose certain constraints on its design.
5.Conclusions
The deep learning domain is, generally speaking, still a very active area of research, with several promising avenues: different RNN network architectures (with LSTM or GRU layers), stacked autoencoders, transformers, attention mechanism, transfer learning, and GAN networks, to name a few prominent ones. Deep learning models specifically designed to learn from multivariate long time series data are particularly interesting for applications to the power system TSA problem. Exploiting the graph-like structure of the power systems with the use of graph neural networks is another promising research direction. Furthermore, deep learning models that use unlabeled data (such as stacked autoencoders) are very attractive, since data labeling can be time-consuming and necessitates applying humans with domain expert knowledge.
Reinforcement learning, as a special subset of deep learning, is yet another approach that shows early promising signs. However, the training of deep reinforcement learning models is notoriously difficult. The landscape of reinforcement learning is rapidly expand- ing, which offers ample research opportunities for integrating it with transient stability assessment, particularly in the area of power system control following a disturbance. This is still a relatively nascent, but very promising area of research.
The importance of the electrical power system to society mandates that further con- vincing results be provided in order to corroborate the stability and robustness of all these various AI approaches. Furthermore, additional and extensive models stress-testing, with different levels of data corruption, is warranted. Potential security issues connected with the wide dissemination of actual WAMS/PMU data need to be addressed as well. This creates space for new research outputs that can fill this gap and increase the overall confi- dence of the entire community in this new technology, for its safe future deployment across power systems.
Computer programs now have the capacity to reason and learn. In order to prognosticate renewable energy sources in the simplest and most effective mores, I largely recommend artificial intelligence use. Real- world data can be gathered by artificial intelligence, similar as literal rainfall patterns and energy demand, which can help an association, function more effectively in society. Artificial intelligence is veritably profitable because it takes pitfalls, works more snappily, and is accessible for diurnal operations as a digital adjunct around- the- timepiece. Artificial intelligence offers colorful types of solar technology, including solar photovoltaic, unresistant solar, solar water heating, solar process heat, concentrating solar power, etc. It principally offers real- time grid monitoring, more precise and effective power change soothsaying, and the creation of multitudinous new energy- related strategies.
• The enabling technologies include: power plants flexibility, utility-scale batteries, IoT, big data and AI, blockchain, behind meter batteries, electric vehicles, mini-smart and renewable grids, super grids,renewable energy to hydrogen and renewable energy to heat;
• The business models include: peer-to-peer energy trading, energy services models, and online payment models;
• The system operation include: dynamic line rating, virtual power lines, corporation between distribution, transmission, and generation, energy forecasting, renewable power production, hydropower storage technologies and future role of utilities and system operators; and
• The energy market design includes: the different time of use tariffs, rising granularity in electricity markets, net billing schemes, the integration of the market with distributed resources, regional markets, innovative ancillary services, and so on.
ResearchGap
From the few country visits across East and Horn of Africa,iobserved that the followingspecific areas require attention:
EnhancingReliability andAdaptability:Further research is needed to understand how AI can improve the reliability and adaptability of decentralized and decarbonized energy systems within or regions. This involves optimizing energy generation and distribution, managing renewable energy sources, and ensuring grid stability.
Addressing Data Challenges: Challenges related to data quality, availability, interoperability, and privacy need to be addressed for successful AI implementation in energy systems. Research should focus on defining data requirements, developing data collection methods, and establishing effective data management strategies.
Policies andInvestmentStrategies:Exploration of policies and investment strategies is necessary to promote AI adoption in the energy sector across our regions(moreso our power pools). Understanding the impact of different policy frameworks, funding mechanisms, and regulatory approaches is crucial for fostering AI innovation and deployment.
EthicalandSecurityConcerns:The ethical challenges, privacy considerations, and security risks associated with AI adoption in decentralized energy systems should be investigated. Developing frameworks and guidelines for responsible and secure AI implementation is important, including addressing biases, ensuring transparency, and safeguarding critical energy infrastructure.
Socio-economic Implications: The broader socio-economic implications of AI adoption in the energy sector need to be studied. This includes analyzing the impact on employment, workforce skills , equity, accessibility, and affordability of energy services. Evaluating the potential benefits and risks for various stakeholders is crucial.
By closing these research gaps, valuable insights can be gained to effectively integrate AI in energy systems, ultimately leading to enhanced reliability, sustainability, and societal benefits.
2.WORLDENERGYSCENARIOS
The world energy assiduity looks to primary shifts in the way it sells, generates, and distributes energy. The energy assiduity is under enormous stress to reduce carbon emigrations and to find applicable ways to manage power force- demand balance across power grids . The main ideal is to move from conventional energy coffers, similar as reactionary energy- grounded energy sources, to a new carbon-free energy source.
There are different types of tailback challenges to espousing AI in the smart energy sector, similar as data quality and lack of data, AI network parameters tuning, specialized structure difficulties, lack of good experts, integration challenges, pitfalls, or compliance issues and legal enterprises. Discovery and opinion of faults are also complex challenges for erecting energy systems. Different inquiries fete that data instability and deficient information are some of the major challenges facing energy systems in our continent. The poor quality of regulators, detectors, and controlled bias for energy system operation and data estimation affects the system’s trust ability and performance. The complex correlations and strong coupling of the power grid, the high data dimensionality, including the massive complexity of large- scale simulation grid data, face new challenges in the energy request. The use of AI to integrate renewable energy, similar as wind and solar, is also complex and delicate for grid operations. Presently, different IT companies have demonstrated amount computing, one of the most effective supercomputers. While quantum technology improves AI- grounded ML ways and increases system processing capabilities, it also increases playing pets. While AI development is an effective and promising development of sustainability, perpetration produces an enormous quantum of carbon footmark, reflecting a direct answer effect. A Single AI learning algorithm can release CO2 emigrations level to five buses. AI ways calculate heavily on different types of energy data, therefore contributing laterally/ directly to the universal carbon footmark of data technology (IT). Other crucial energy- related AI challenges include
• Non-theoretical history: One reason for AI’s decelerating growth in the energy sector is the lack of crucial AI chops among decision makers. Utmost associations warrant the technological background to understand how they would profit from AI operations.
• Lack of practical moxie: There are numerous professionals with in- depth specialized aspects. still, it is extremely delicate to find good professionals to make dependable AI- powered operations with real practical benefits. Although power companies cover and maintain data, digitizing with advanced operation software is problematic. Data loss, poor configuration, device malfunction and unauthorized access are related pitfalls. Because the cost of mistake in the energy sector is high, numerous companies are reticent to consider trying new strategies with little moxie.
• Outdated power system structure: An outdated structure is the topmost handicap to the modernization of the energy sector. At current, mileage companies are trapped in a lot of data they produce; they’ve no idea how and when to deal with it. Although the assiduity has further data than anyone differently, the data is also dispersed, disorganized, spread across different formats and stored locally. While the assiduity has huge gains, it also suffers from the vulnerabilities of outdated systems.
• Profitable pressure: The integration of innovative advanced energy technologies may be the right object to do, although it isn’t cheap. It takes a long time and plutocrat to find a well- established software provider, make and configure software, qualify, maintain, and manage it. Either, this deployment of energy technology will affect developing, conforming, and controlling software that needs a great deal of backing and coffers.
• Decentralization and diversification: Decentralization and diversification of energy force, together with the development of arising AI technologies and adding demand trends, produce complex problems for energy product, energy transmission, energy distribution, and cargo consumption in all countries of the world.
• Cellular technologies: Cellular technology dependence limits the significance of AI in numerous developing husbandries, particularly low- income countries, pastoral and other underserved areas within our East and Horn of Africa regions. The adding trouble of cyber attacks is getting decreasingly popular, and a major concern, substantially as automated control and smart metering account for nearly 10 of global grid investment.
• Black: boxes AI- grounded operations are black boxes for consumers, utmost of whom don’t fete their internal functions or how they’ve been created, which constitute a implicit trouble. And, given that the current ways are far from perfection, the protections will be productive as they are integrated into the power systems.
5. CONCLUSION
In conclusion, decentralization, decarbonization, and digitization are causing a rapid shift in the energy sector. AI proves to be a useful tool for improving the reliability and adaptability of the electricity system. With applications ranging from big data analytics to intelligent robotics and cyber attack prevention, the vast capabilities of AI can be divided into assessment, inference, and response. Effective data analysis, machine learning, and AI application depend on high-quality data sets. Governments from all around the world are embracing various AI policies, concentrating on their own advantages and societal demands. The construction of AI ecosystems and clusters, as well as strategic investments in AI research and development, can promote innovation in both the private and public energy sectors. To maximize the advantages of AI while minimizing any potential negatives, ethical issues, data privacy, and security are being addressed. Overall, AI has the ability to alter the energy industry, propel future growth, and manage and navigate new energy systems.
The East Africa onstruction industry has long been plagued by inefficiencies, delays, and lack of transparency, which have hindered its ability to deliver projects on time and within budget. In recent years, blockchain technology has appeared as a promising solution to address these challenges,mostly in my moter country Kenya. It has gained significant attention in many industries (e.g., finance and healthcare) due to its potential to provide secure and transparent methods of recording and verifying transactions. The application of blockchain technology in the construction sector has been explored in various areas such as supply chain management, quality control, and project financing.
Smart contracts, which are self-executing agreements with the contract terms directly written into code, have been one of the most popular blockchain applications abroad. It has the potential to redefine and streamline the traditional cumbersome and inefficient contractual process in construction in our region(East Africa, Horn of Africa and Sub Saharan Africa as well). By automating contract terms and enforcing compliance through self-executing codes, smart contracts can eliminate the need for intermediaries and reduce the risk of disputes and delays. The benefits of smart contracts can be amplified, when combined with other construction technology and methods such as building information modelling (BIM) and integrated project delivery (IPD), which enables real-time collaboration, data management, and decision-making throughout the project lifecycle.
A number of existing efforts have started to explore the possible applications of smart contracts in construction. For example, Swan et al. (2015) have applied the smart contract technology in the procurement phase of construction projects, which eliminated the need for third-party mediators like banks, resulting in decreased fees and administration costs. By embedding the payable amount and due date of goods in the smart contract, both parties can ensure that the money is locked in the system until the due date of payment. The self-executing feature of smart contracts allows for automatic release of payment to the client’s cryptocurrency account, as verified by both parties within the system.
However, despite the importance of existing efforts, significant knowledge gap still exists. The development of smart contracts in construction requires a deep understanding of complex construction contracts and substantial technical expertise. Existing smart contracts in the market are mostly from a general domain (e.g., finance, game, or notary). However, the complex nature of construction projects, which involves numerous parties participating in the contractual process and various local regulations, makes the general smart contract systems not suitable to apply in the construction industry.
To address this knowledge gap, this paper explores the potential of blockchain and smart contracts in construction and discusses how their integration with BIM and IPD can create a more efficient and collaborative construction process. Leveraging these technologies can propel the construction industry towards increased efficiency and transparency. Smart contracts could empower all project participants with decision-making abilities regarding resource allocation and contractor selection. This may lead to a more inclusive and equitable industry that minimizes conflicts and promotes timely project delivery.
2. BlockchaininConstruction
Blockchain and smart contracts are increasingly being explored for their potential in enhancing construction management and boosting overall efficiency. For example, construction supplies can be monitored using smart contracts to ensure compliance with quality and safety standards and regulations. In an effort to enable a seamless flow of information and transactions across the construction supply chain, as well as improve collaboration and coordination among project stakeholders, BIM has been highlighted as a critical technology that can be integrated with blockchain and smart contracts. For example, BIM models can be stored on a blockchain platform, which allows all stakeholders to access and update the most current version of the model in real-time. Smart contracts can also be used to automate BIM- related processes, such as model validation and clash detection, which can help reduce errors and delays in the construction process. Overall, the integration of blockchain, smart contracts, and BIM has the potential to revolutionize the construction industry by increasing transparency, improving collaboration, and reducing the costs and time associated with traditional construction processes.
3. KnowledgeGaps
The use of smart contracts in the construction industry has gained attention in recent years due to its potential to improve project efficiency, reduce costs, and increase transparency. Once the pre-agreed conditions are met, the system executes the contract automatically without the need for intermediaries, such as lawyers or arbitrators. However, there are still a number of issues that need to be addressed before smart contracts can be effectively developed and implemented in the construction industry. One of the biggest challenges is the complexity of construction contracts, which may be difficult to translate into general smart contracts. Construction contracts are complex due to their multi-party nature, with various stakeholders involved, and their need for local legal and regulatory compliance. On one hand, construction projects involve complex interactions among various parties, such as contractors, subcontractors, owners, and regulators. The specific requirements and constraints of different parties need to be adequately addressed by the smart contracts. For example, construction projects often involve physical work and the use of tangible materials, which requires additional tracking and verification mechanisms that are not typically included in general-purpose smart contracts. On the other hand, construction projects may be subject to various regulations and safety standards that need to be incorporated into the smart contract design. Therefore, there is a need for the development of a smart contract system that is specifically tailored to the construction industry and its unique requirements to effectively utilize this technology in construction projects. This would involve careful consideration of the various stakeholders involved, as well as the specific regulatory and safety requirements that must be addressed.
Second, there is a lack of awareness and understanding of smart contracts among stakeholders in the construction industry. Construction industry has historically been slower to adopt new technologies compared to other sectors. Many industry professionals, such as project owners, architects, engineers, contractors, and subcontractors, may not be familiar with the potential advantages, limitations, and applications of smart contracts. This lack of understanding could hinder the widespread adoption and implementation of the technology, as well as pose significant challenges in the development of best practices and standards.
Third, there are technical limitations that need to be addressed in the development and implementation of smart contracts in the construction industry. One of the limitations is the scalability of smart contracts, as they may become slow and inefficient as the number of participants and transactions increase. There may also be challenges in terms of security, standardization, and interoperability with existing systems and processes.
Q- Are AI applications used in our power plant emit ‘clean’ emmissions?
As artificial intelligence (AI) continues to embed itself in our daily lives across East Africa (mostly Kenya), many engineers within the EAC region focus on the threats it poses to privacy, security, due process, and democracy itself. But beyond these legitimate concerns, AI promises to optimize activities, increase efficiency, and enhance the accuracy and efficacy of the many aspects of society relying on predictions and likelihoods. In short, its most promising applications may come, not from uses affecting civil liberties and the social fabric of our society, but from those particularly complex technical problems lying beyond our ready human capacity. Climate change is one such complex problem, requiring fundamental changes to our transportation, agricultural, building, and energy sectors. This Article argues for the enhanced use of AI to address climate change, using the energy sector to exemplify its potential promise and pitfalls. The Article then analyzes critical policy tradeoffs that may be associated with an increased use of AI and argues for its disciplined use in a way that minimizes its limitations while harnessing its benefits to reduce greenhouse-gas emissions.
Emissions from artificial intelligence applications AI is often presented as “clean tech”. For example, Apple and Google recently maintain that they are carbon neutral (due to the purchase of emission credits), and Microsoft announces that it will be carbon negative by 2030 . However, it is unclear how large the emissions actually are. The companies are not open to this. Transparency is lacking. To get some understanding, we need to look at independent studies. Support for the projection that AI will contribute substantially to climate change can be found in studies of the actual and expected carbon footprint of ICT in general. An important study of the carbon footprint of the ICT sector, in general, was carried out by Belkhir and Elmeligi (2018). The scope of the study was computing devices (for example, desktops, laptops, smartphones and tablets), data centres and communication networks.The study excluded, for example, TVs and printers (Belkhir and Elmeligi, 2018). This is how Belkhir and Elmeligi summarized their study: We have conducted in this study what we believe to be the most detailed, precise and methodical analysis of the ICT global GHGE footprint, which includes both the production and the operational energy of ICT devices, as well as the operational energy for the supporting ICT infrastructure. We have found that the ICT GHGE contribution relative to worldwide footprint will roughly double from 1 to 1.6% in 2007 to 3–3.6% by 2020. Assuming a continued annual relative growth ranging from 5.6 to 6.9%, ICT’s relative contribution would exceed 14% of the 2016-level worldwide GHGE by 2040 […] The lion share of the emissions were found […] to be generated by the ICT infrastructure with data centers being the largest culprit (45%) followed by communication networks (24%) (Belkhir and Elmeligi, 2018; “GHGE” means “greenhouse gas emissions”). We see here that the emissions from ICT, in general, are projected to exceed 14% of the global emissions by 2040, with the main part generated by the ICT infrastructure, mainly data centres and communication networks. This projection gives us reason to expect that AI, as an increasingly significant part of ICT, will also become a substantial cause of emissions (Gailhofer et al., 2021). A study focused explicitly on AI as a contributor to climate change was conducted by Strubell et al. (2019). They investigated the carbon footprint of several different AI models. They concluded that the emissions vary significantly among models. The highest emissions were found in the training of an AI model for natural language processing (NLP). This training was estimated to emit approximately 300,000 kg CO2e (Strubell et al., 2019). As Dobbe and Whittaker point out, these emissions correspond to the emissions of approximately 125 round-trip flights from New York to Beijing (Dobbe and Whittaker,2019). Two things should be noted here. First, the study uses a USA-wide average of the energy mix. In regions and countries with more fossil-free energy, the emissions will be lower. Second, this study concerns the training of the AI models only. The use of the models in the real world (“inference”) leads to further emissions.
Artificial intelligence and climate change These studies of ICT in general and AI more specifically indicate that AI can be expected to contribute substantially to climate change. However, lacking from these studies is an assessment of emissions due to systemic effects, for example, rebound effects (Gailhofer et al., 2021). Economists talk about the “Jevons paradox”. Jevons was a 19th century British economist who argued that more efficient use of coal would not necessarily lead to less use but rather to more use (Michaels, 2012). Several types of rebound effects resulting from improved energy efficiency have been empirically established in various societal domains: direct rebounds, indirect rebounds, economy-wide rebounds and embedded rebounds (Michaels, 2012; Brockway et al.,2021).
Take the example of improving the energy efficiency of cars. This may lead to increased use of cars (direct rebound), which may increase the demand for tires (indirect rebound) and to increased use of energy in restaurants and hotels visited when travelling around (economy-wide rebound). Moreover, the production of more energy-efficient cars itself also requires energy inputs to be accounted for (embedded rebound) (Michaels, 2012). Let us assume that the energy efficiency of the cars in this example is improved by means of AI. On this assumption, the example indicates that the use of AI might have a multitude of rebound effects. To put it more generally, improved energy efficiency by using AI might increase the demand of AI applications in various societal domains and thereby increase the total use of energy in society. To the extent this energy is based on fossil fuels, the climate risks are obvious.
A special comment on the embedded rebounds of AI seems warranted. These rebounds include not only factory production of hardware and other devices necessary for AI, for example, computers, data servers, cables and batteries for electric vehicles. They include also the extraction of metals such as lithium and cobalt and other materials. Moreover, they include transport of these materials to factories for the production of components, followed by transport to other factories for the production of the end-product. Finally, the devices are transported to AI developers and users. To the extent fossil fuels are used, each step in the production chain leads to greenhouse gas emissions, and all these emissions should be included among the total emissions from AI (Crawford, 2021, pp. 23–51).
In sum, due to its potential impact in various societal domains, AI can be expected to require vast amounts of energy, and at present and in the near future, this energy comes to a large extent from fossil fuels. This leads to substantial greenhouse gas emissions. It seems fair to conclude that AI might be a significant contributor to climate change.
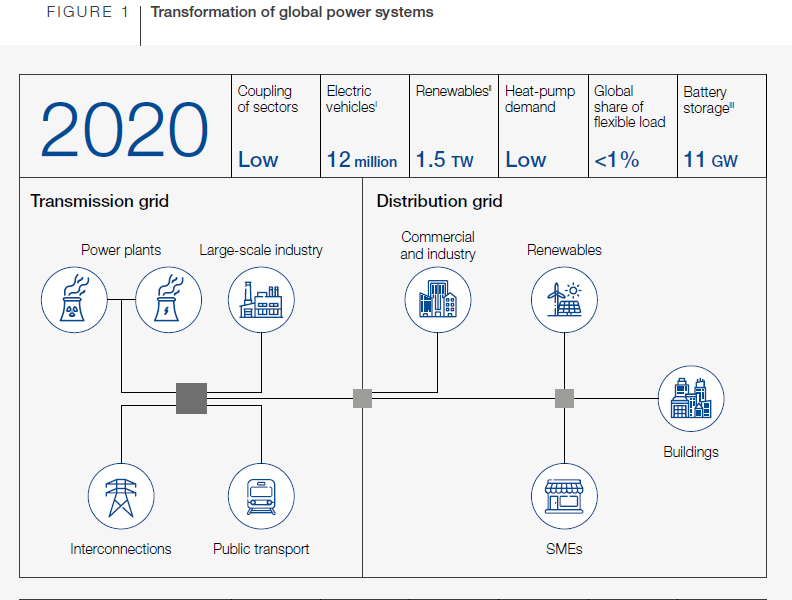
East and Horn of Africa energy systems are in transformation, and several key trends are driving AI’s potential to accelerate these energy transitions. The global energy system however is currently undergoing a massive transformation, and in the decades ahead, it will continue to become more decentralized, digitalized and decarbonized. To reach the commitments made under the 2015 Paris Agreement – limiting the global temperature rise to well below 2°C – this transition MUST accelerate. In recent years, the energy sector has become increasingly digital and it is clear that further digitalization will be a key feature of the energy transition and an essential driver of the sector’s progress towards ambitious climate goals. The energy transition must be swift and coordinated; digitalization is needed in our continent as an enabler Decarbonizing the power sector is the starting point for full-system decarbonization. To achieve deep decarbonization as a region, it will be necessary to shift swiftly to an energy system with no or very little carbon dioxide emissions. The efforts to decarbonize our energy system are leading to an increasingly integrated and electrified energy system with much more interaction between the power, transport, industry and building sectors, and a system that will consist of interdependent energy and telecommunication networks. To accelerate the shift towards a widespread, affordable, low-carbon energy supply, there is a need for greater optimization of every aspect of this energy system, as well as greater coordination and cooperation between each component. This requires a better understanding of, and better mechanisms to monitor and control, the ways in which power grids, buildings, industrial facilities, transport networks, and other energy-intensive sectors integrate and interact with one another. This is where digitalization comes in: it is the key to linking the different sectors into the most reliable, affordable and cleanest system possible. Optimizing each sector separately would exclude flexibility-generating options and reduce the scope for system-wide transformation processes that would maximize the benefits of digital technology for the full energy system, as well as more broadly for the economy, the environment and society.
Digital technologies already automate complex processes, orchestrate disparate systems, and facilitate information sharing in the energy sector, and software already plays a significant role in managing our energy systems. With the explosion in the availability of data, and as performance continues to improve, digital technologies will play an increasingly central role in driving a swift and cost-efficient energy transition. These technologies will facilitate performance improvements and cost savings through a combination of automation, optimization, and the enabling of new business and operational models both within and beyond the traditional value chain of generation, transmission, distribution, trade and consumption. The transformation of the energy system will include a rapid expansion of the renewable power supply and vast clean electrification of heat, industry and transport. As electric vehicle (EV) adoption grows more so in Kenya and now Tanzania, battery storage costs decline, and buildings and heavy industry turn to net-zero electricity, the share of global energy demand met by electricity is projected to grow by 60% from 2023 to 2050. Electricity will increasingly be used to provide heating and cooling (e.g. heat pumps), transport (e.g. EVs) and even raw materials such as hydrogen (electrolyzers).
As electricity supplies more sectors and applications, it will become the central pillar of the global energy supply. This will create both new opportunities for value creation and put new pressures on our current systems of power generation, transmission, trade and distribution. To reach the commitments made under the 2015 Paris Agreement – limiting the global temperature rise to well below two degrees Celsius– the energy transition must accelerate. Harnessing Artificial Intelligence to Accelerate the Energy Transition 5 This transition requires significant investment .The future power system looks highly decentralized The complexity of managing the power system will increase significantly In BNEF’s New Energy Outlook 2024, a longterm economic transition scenario on the future of the energy economy, 56% of power generation could be provided by solar and wind in 2050 – a massive 7.6 TW of solar and 4.6 TW of wind.This scenario assumes no further policy support from today’s levels and reflects the fact that favourable solar, wind and storage economics have become a significant drivers in the rapid decarbonization of the power sector, even without strong carbon prices or net-zero targets. According to BNEF estimates, this Economic Transition Scenario would require $15.1 trillion investment in solar, wind and batteries, and $14 trillion power grid investment by 2050. Even with these historic investments, the scenario outlined above would likely lead to an estimated 2.2°C global warming by 2050. To achieve global netzero emissions by 2050, every sector of the energy economy with our assigned regions needs to eliminate emissions completely. This, according to BNEF’s net-zero scenario, would require investments in energy infrastructure to total between $92 trillion and $173 trillion between 2020 and 2050. The move towards greater proportions of renewable energy generation has two main practical consequences: the future power system will host more power from intermittent power generators (since solar panels only produce when the sun is shining, and wind turbines when the wind is blowing), and it will be more decentralized. In BNEF’s Energy Transition Scenario, 13% of all global power capacity in 2050 will comprise distributed small-scale photovoltaic (PV) energy and batteries, up from 4% .This will accelerate an ongoing trend of shrinking median power plant size.
Extrapolating from current deployment trends and taking into account decarbonization targets, it is clear that in the future there will be vastly more physical assets connected to the power grid and, in particular, the distribution grid, where power flows are becoming increasingly dynamic and multidirectional (see Figure 1). These assets might generate power to sell back to the grid (e.g. solar homes), use large amounts of power at once (e.g. EV fast charging) causing demand to spike, or the assets might be connected to the grid without grid operators being aware (e.g. smart home devices). These dynamics could challenge the grid’s stability and performance, leading to issues such as power frequency imbalances, blackouts and brownouts, and significant capacity overbuild. Without realtime data, advanced analytics and automation, the increasingly complex power and energy systems of the future will become impossible to manage.
Renewable power generation and demand forecasting.
As renewable power generation grows, both in absolute terms and as a share of the power supply, it will become essential to better predict solar and wind power generation, to improve capacity factors and production uptime at solar and wind plants, and to accurately forecast power demand. From power plant siting and design through to power scheduling and dispatch, AI has a role to play.
Grid operation and optimization
Current plans within the two african regions to reach net zero by mid-century imply a massive increase in renewable generation capacity and expansion of transmission infrastructure within a relatively short period of time. Due to the long lead times to plan and commission new transmission infrastructure, the deployment of new transmission capacity might become a bottleneck. Using AI to optimize grid operation and enhancing the capacity of existing transmission and distribution lines, as well as extending the lifetime of existing equipment, will be key to supporting the energy transition. In addition, in an integrated and decentralized energy system, responsibility for system optimization happens at both the higher and lower voltage levels, distribution grids become more important, and maintaining grid stability and ensuring the security of supply become more complex. AI can be helpful in grid planning to optimize infrastructure build by extending the lifetime of expensive grid equipment and keeping the whole grid system stable, even as more renewables are integrated.
management of energy demand and distributed resources
AI can help increase the penetration and use of distributed renewables and has the potential to significantly accelerate their deployment. It is also being used effectively in improving energy efficiency in buildings, factories and data centres. Being able to reduce, manage, aggregate and manipulate energy demand will be an important factor in how effectively and cheaply the energy sector can decarbonize.